
SRS working principle
The Subsurface Radar Sounder (SRS) is a nadir-looking radar sounder instrument, which transmits low-frequency radio waves with the unique capability to penetrate into the subsurface. When these radio waves travel through the subsurface, their reflected signal varies in power through the interaction with subsurface horizons and structures representing dielectric discontinuities. These varying reflections are detected by the radar sounder and used to create a depth image of the subsurface (referred to as radargram) and so map unexposed subsurface features. The design of the SRS instrument depends on the physical and electromagnetic modelling of the surface and subsurface targets.

SRS science targets for subsurface observation
On the surface of Venus, a number of unusual geological features such as pancake domes, complex ridged terrain (tesserae) and unusually long lava channels have been identified from images acquired by previous missions. The knowledge of how these features were formed can reveal significant information about the geodynamic evolution of Venus’ surface and interior. SRS can acquire fundamental information on subsurface geology by mapping the vertical structure (mechanical and dielectric interfaces) and properties of tesserae, buried craters plains, lava flows and volcanic features, thus providing useful data for inferring their genesis. It can also provide information on the surface in terms of roughness, composition and dielectric properties at wavelengths completely different from those of SAR, thus allowing a better understanding of the surface properties. The goals of the SRS measurements are:
- To determine any layering in modified craters and to search for buried craters
- To characterize buried strata
- To determine the three-dimensional structure of the tesserae and to characterize cross-cutting relationships at their edges
- To determine the volume of flow units and help to establish the sequence of emplacement events
- To search for buried features and understand in three dimensions the boundaries between units
SRS sounder design
SRS heritage includes RIME onboard JUICE, MARSIS on the Mars Express and SHARAD on the Mars Reconnaissance Orbiter. SRS consists of a deployable dipole antenna and an instrument block consisting of two main parts: the receiver and digital subsystem (RDS), containing the receiver module and the digital electronics section (DES) that includes the digital and conversion functions; and the transmitter (Tx) and matching network, which provide the high power amplification for the signal for transmission and impedance matching to the antenna.

SRS operation modes
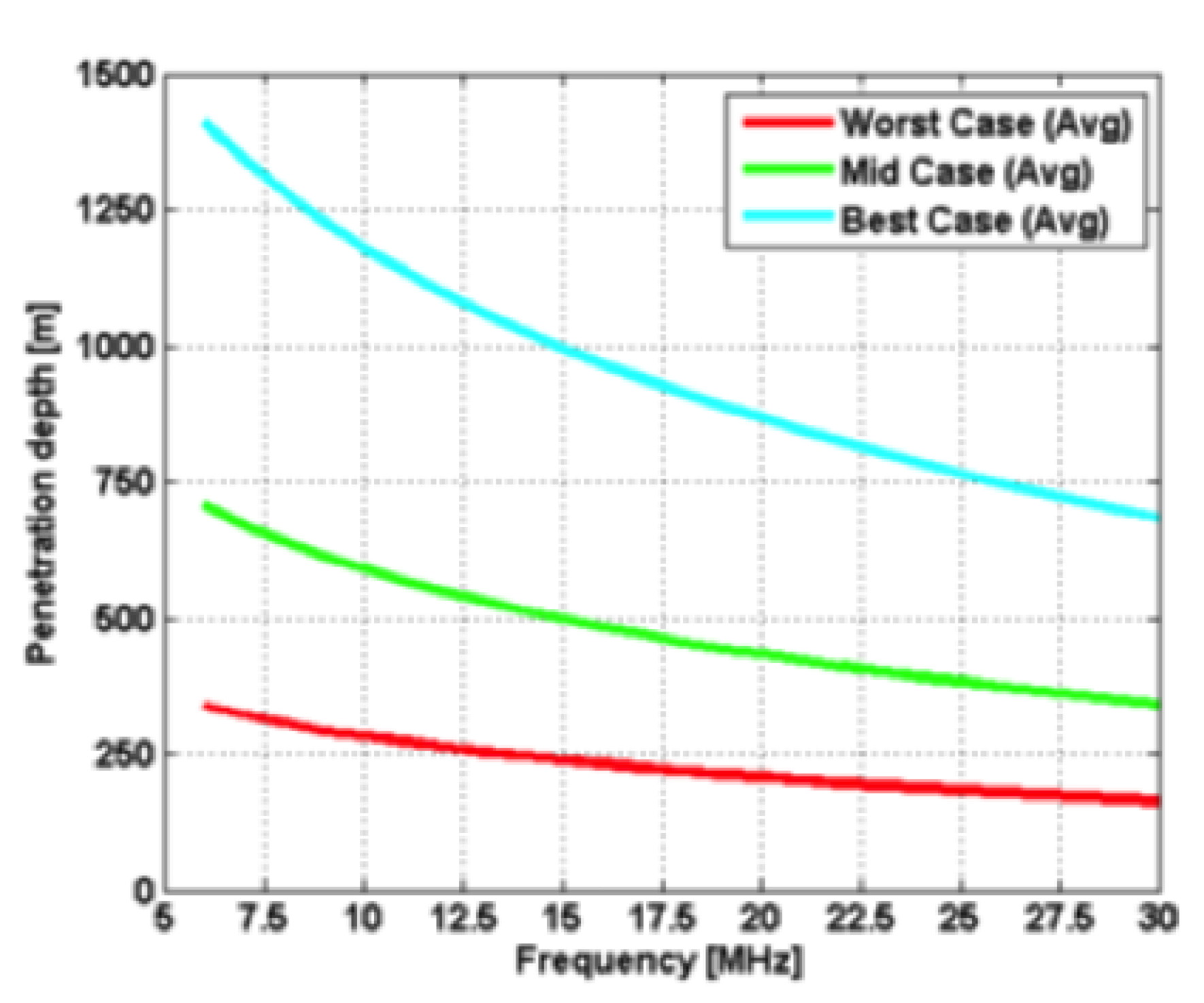
To achieve the science goals, the radar shall be designed to work with a central frequency in the range 9 to 30 MHz for optimal ground penetration capability. The baseline is to adopt a central frequency of 9 MHz with 6 MHz bandwidth resulting in a fractional bandwidth of about 67%. The maximum radiated power baseline is 200 W. The SRS maximum penetration depth has been inferred from the various dielectric measurements in different types of Venus-analog basaltic rocks. For the baseline configuration assuming a mean relative permittivity ε = 6, radar operations at a central frequency of 9 MHz result in an average penetration of 600 m and a range resolution of ~16 m. Higher central frequencies, such as 30 MHz, result in a shallower penetration (~350 m) and an improved resolution of 5 m.
In the nominal mode for science operation different parameters can be combined to accomplish two main kinds of acquisitions:
- SRS Hi-density: To acquire data of some high relevance targets (~20% of the planet) with high resolution and track-to-track distance ≤10 km. The high density allows a better reconstruction of the analyzed area.
- SRS Low-density: To acquire low-resolution data for obtaining uniform global coverage (>80% of the planet) with track-to-track distance ≤50 km.